مدار چپگرد راستگرد اتوماتیک با تایمر پی ال سی
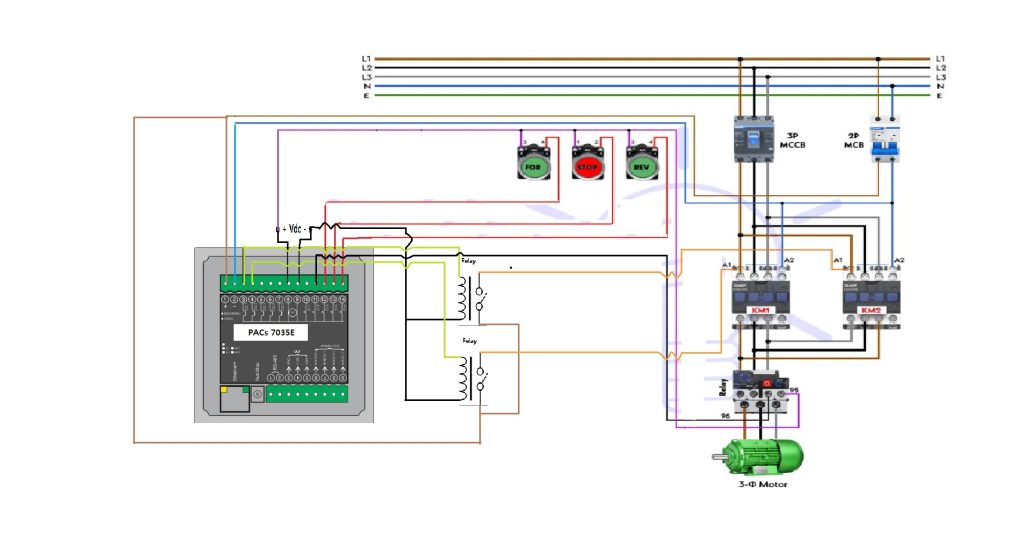
برای کنترل موتور به صورت چپگرد و راستگرد می توان از پی ال سی بهره جست. در این نوشته به بررسی این موضوع پرداخته شده است. بدین صورت که در ابتدا مدار چپگرد راستگرد اتوماتیک با تایمر پی ال سی به صورت گرافیکی به نمایش در آمده است تا شما عزیزان با نحوه سیم کشی آشنا شود. پس از فراگیری نحوه سیم کشی ( مدار قدرت و کنترل ) اقدام به برنامه نویسی plc شرکت فراروپایا برای کنترل موتور به صورت چپگرد راستگرد و استاپ آن شده است. در انتها به منظور صحت عملکرد کدهای نوشته شده، برنامه در محیط سیمولینک نرم افزار FBD Editor شبیه سازی شده است.
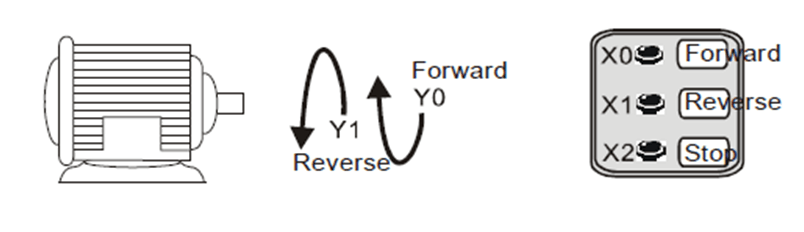
هدف سیستم کنترلی:
کنترل چپگرد، راستگرد و استاپ کردن موتور توسط کلیدهای X0,X1,X2.
المان های مورد نیاز:
حل مساله با نرم افزار FBD Editor:
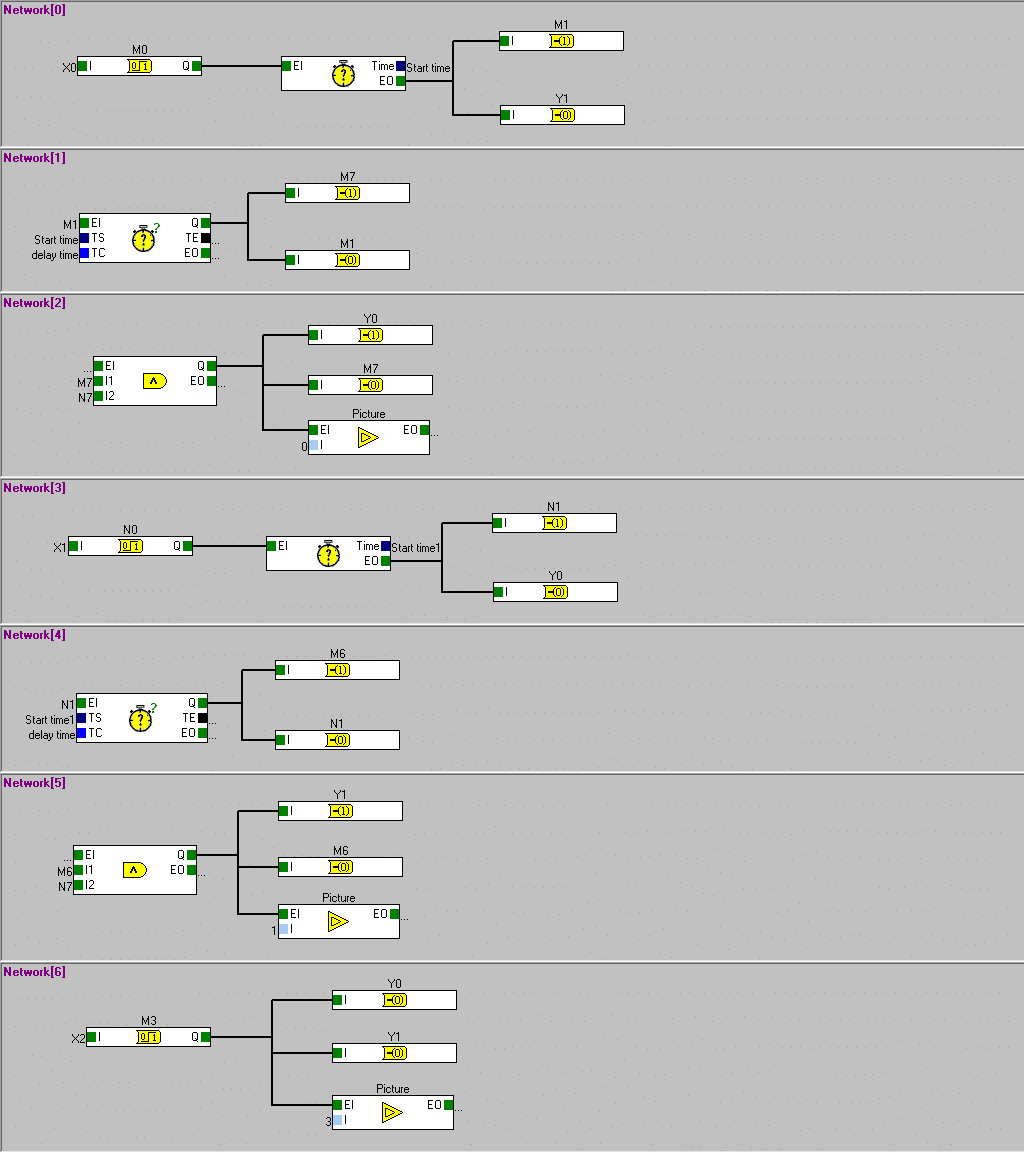
شرح برنامه:
- با فشرده شدن دکمه راستگرد، X0=ON و بعد از گذشت یک ثانیه(delay Time=1000msec)کنتاکتور مربوط به مدار راستگرد (Y0) بسته شده و موتور شروع به گردش به صورت راستگرد می کند.
- با فشرده شدن دکمه چپگرد، X1=ON و بعد از گذشت یک ثانیه (delay Time1=1000msec) کنتاکتور مربوط به مدار چپگرد (Y1) بسته شده و موتور شروع به گردش به صورت چپگرد می کند.
- با فشرده شدن دکمه استاپ، X2=ON و هر دو کنتاکتور چپگرد و راستگرد(Y0,Y1) غیرفعال شده و موتور متوقف می شود.
- تاخیر اعمال شده بین مدارهای چپگرد و راستگرد برای پرهیز از اتصال کوتاه در مدار موتور است.
- ذکر این نکته حائز اهمیت است که در برنامه FBD Editor شرکت فراروپایا تایمر تاخیر در وصل (ON Delay timer) و تایمر تاخیر در قطع (OFF Delay Timer) به صورت مستقیم وجود ندارد و کاربر با بلوک های GET Time و Elapse Time قادر به ساختن هر نوع تایمری خواهد بود. برای توضیحات بیشتر در این رابطه آموزش مربوط به تایمرهای تاخیر در قطع، تایمرهای تاخیر در وصل را دنبال کنید.
شبیه سازی برنامه در محیط نرم افزار FBD Editor:
برای مطالعه بیشتر روی لینک کلیک کنید تا به برنامه نوشته شده در محیط FBD Editor دسترسی داشته باشید.